最速下降法

t为步长 是迭代出的第k个向量 是梯度
性质:
锯齿现象:相邻两次迭代点的梯度正交()
线性收敛,不具有二次终止性,一般要无限步迭代(某些特殊初始点可以有限步终止)
当原函数为正定二次函数时,t有显式计算公式
(其他无约束最优化方法的步长均可使用该公式):
非二次正定函数时,只能使用代入函数,对t求导使其导数为零的方式寻找最优步长
原函数二阶导矩阵,即 Hession矩阵为正定时,最终的结果是严格局部极小点
Newton法

性质:
二次终止性 二阶收敛
对于正定二次函数,迭代一步得到极小点
非正定函数,一般不会有限步终止,通常使用修正Newton法
修正Newton法
当奇异时(不存在) 使用直线搜索法,即 也就是,记该式为公式1 ()
当非奇异时,沿用Newton迭代公式 ,
-
若 迭代有效
-
若 迭代无效,使用以下规则:
2.1 当 (是一个接近于0的整数) 时 ,说明g与p几乎垂直,即p是不利的方向,改取 p为,按公式1运算(此时退化为最速下降法)
2.2 当 时,p为下降方向,按公式1计算
2.3 当 时,p为上升方向,改取p为-p,按公式1计算
共轭方向法
共轭方向法具有二次终止性.
对于n元正定二次函数,共轭方向法至多迭代 n 次即可求到极小点
对于非正定二次函数,共轭方向法一般不会有限步迭代终止
F-R共轭梯度法
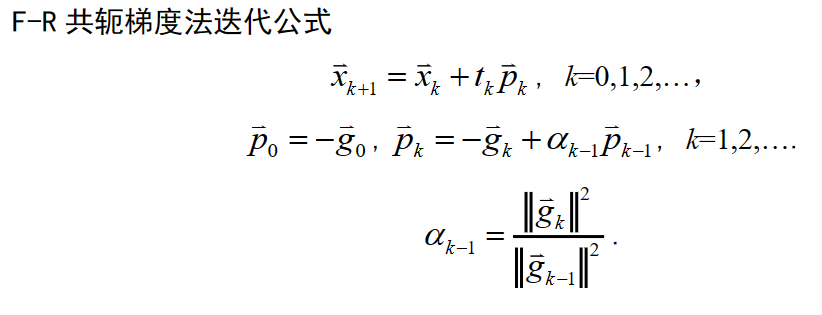
共轭梯度法是共躯方向法,是下降算法,超线性收敛
矩阵的二范数(Frobenius 范数)是矩阵元素平方和的平方根
DFP法

DFP 法是共扼方向法,是下降算法,超线性收敛.
步长加速法
略
最小二乘法
即最小化线性回归模型()的残差平方和
Minimize
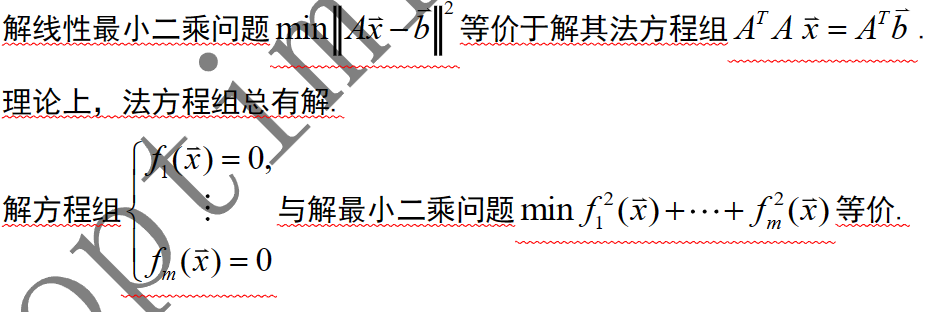
解 得最小二乘解 ,同时也是回归方程的解
线性方程组的解指带入最小二乘解的值
s为零则有解,s不为零无解


